 Faites un don
Faites un don

Le véhicule (et particulièrement la voiture) autonome fait régulièrement la Une des médias. Les effets d’annonce récurrents ne facilitent guère une analyse raisonnée du concept et des conséquences potentielles de sa mise en œuvre. Nous allons néanmoins, dans les lignes qui suivent, nous lancer dans une tentative d’analyse en nous basant sur quelques documents et avis étayés.
Tout nouveau produit ou service en cours de développement suscite espoirs et craintes. Ceci est particulièrement vrai lorsqu’il s’agit d’un développement technologique qui touche un des biens de consommation les plus valorisés dans nos sociétés : la voiture. Car même si de nombreux véhicules pourraient potentiellement être autonomisés et même si certains le sont déjà[[En 2016, on comptait au niveau mondial 803 km de lignes de métro entièrement automatisées en opération réparties dans 37 villes (source : UITP).]], le débat est souvent réduit aux seules voitures.
Les opérateurs de transport et les autorités locales qui ont en charge la gestion de l’espace public sont concernés au premier chef par l’autonomisation des véhicules. Aussi est-ce notamment à la lumière des documents produits par l’UITP (Union Internationale des Transports Publics)[[Autonomous vehicles: a potential game changer for urban mobility, téléchargeable ici: http://www.uitp.org/sites/default/files/cck-focus-papers-files/PolicyBrief_Autonomous_Vehicles_LQ_20160116.pdf]] et POLIS (réseau de villes et régions pour le transport durable)[[Road vehicles automation and cities and regions, téléchargeable ici : https://www.polisnetwork.eu/uploads/Modules/PublicDocuments/polis_discussion_paper_automated_vehicles.pdf]] que nous allons mener la présente analyse.
L’UITP résume en ces termes les craintes et les espoirs que lui inspirent les véhicules autonomes : « conduiront-ils à plus de voitures sur les routes, plus de désurbanisation et plus de congestion ? Ou contribueront-ils à dessiner des villes soutenables et vivables, à regagner de l’espace public, à diminuer le nombre de véhicules sur les routes et à améliorer la qualité de vie ? » On pourrait compléter en s’interrogeant sur la manière dont ces véhicules contribueront – ou non – à améliorer le bilan environnemental du transport (consommation de ressources, émissions de gaz à effet de serre et de polluants atmosphériques, …) et à réduire le nombre de victimes induites par le trafic routier.
POLIS, pour sa part, souligne « le biais optimiste induit par les médias et la littérature à propos de l’introduction de véhicules autonomes ». Nos contemporains voient en effet généralement d’un bon œil les développements technologiques, auréolés du statut de solutions aux maux dont souffrent nos sociétés. Il convient donc de s’abstenir de glisser sur le plan émotionnel. Rien de tel pour ce faire qu’un bon petit rappel factuel : la SAE (Society of Automotive Engineers – société américaine des ingénieurs du secteur automobile) a défini cinq niveaux d’automatisation (tableau 1) dont seul le dernier (niveau 5) correspond à une automatisation complète. L’introduction de voitures automatisées de niveau 5 dans tous les environnements est difficile à prédire : certains constructeurs annoncent 10 ans, certains analystes pensent plutôt à 50 ans, voire plus[[Paths to a self-driving future, KiM Netherlands Institute for Transport Policy Analysis and The truth about self-driving cars, Steven Schladover, University of Berkeley and California Path Programme Manager, Scientific American magazine, June 2016]].
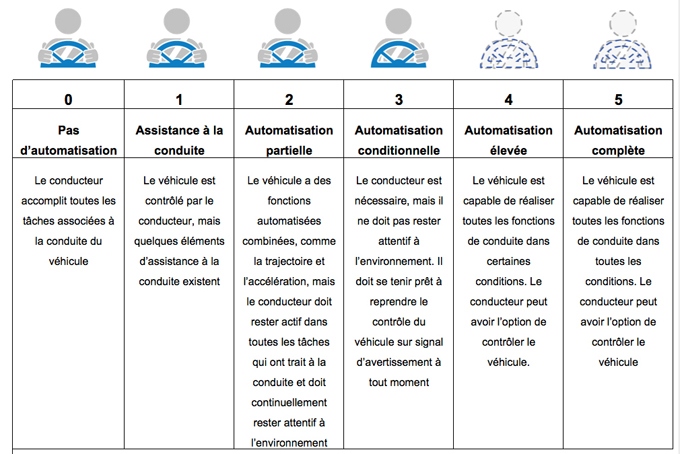
Tableau 1 : les cinq niveaux d’automatisation définis par la société américaine des ingénieurs du secteur automobile (source : SAE)
Quelle influence sur le trafic routier ?
L’organisation actuelle de nos sociétés génère des pointes de demande de transport (principalement en début et en fin de journée) auxquelles correspondent des pics de trafic et des problèmes de congestion. Dans l’hypothèse où la migration vers les voitures autonomes ne modifiera ni la taille du parc automobile (500 voitures pour 1000 habitants) ni l’utilisation qui en est faite (taux d’occupation de l’ordre de 1,3 personne par voiture), les problèmes de congestion demeureront. Si cette migration s’accompagne du développement de flottes partagées et que les propriétaires de ces flottes cherchent à limiter les capacités de pointe dans un souci bien compréhensible d’optimiser l’utilisation de leurs véhicules tout au long de la journée, ils pourraient généraliser le principe de tarifs de location différenciés en fonction de l’heure. En résulterait un étalement des pointes de trafic.
Tous les possibles semblent donc ouverts. Au point même que certaines études[[Urban mobility systems upgrade, International Transport Forum and city of Amsterdam-commissioned study Impact of self-driving vehicles on the city of Amsterdam]] pointent le risque d’une augmentation du nombre de kilomètres roulés – voire du nombre de voitures – sous l’effet d’un shift modal des transports en commun et des modes actifs (marche et vélo) vers la voiture autonome. Celle-ci pourrait en effet se profiler comme la synthèse des avantages de la voiture privée (service porte-à-porte avec un seul véhicule) et des transports en commun (temps de transport pouvant être dédié au travail, à la lecture, …) et dès lors séduire de nouveaux utilisateurs que le temps perdu dans les bouchons n’effraierait plus. Pour forcer le trait, pourquoi ne pas « se faire » une petite série TV dans les embouteillages en regagnant sa quatre façades en banlieue ?
Sécurité routière – ne pas attendre demain
Un des principaux atouts de l’automatisation des véhicules résiderait dans la diminution du nombre et de la gravité des accidents de la route. Mais cet effet potentiel ne pourrait vraisemblablement s’exprimer que dans l’hypothèse d’une flotte entièrement constituée de véhicules de niveau 5 (cfr tableau 1 ci-dessus). Les effets de la cohabitation de plusieurs niveaux d’automatisation semblent plus difficiles à appréhender. L’arbre de la voiture autonome ne cache-t-il donc pas la forêt des solutions à l’insécurité routière ? Cela semble être l’avis d’Antonio Avenoso, directeur exécutif de l’ETSC (European Transport Safety Coucil : conseil européen pour la sécurité dans les transports) qui déplore que « les décideurs politiques et les constructeurs automobiles deviennent tellement obsédés par le rêve d’un futur autonome qu’ils en oublient nombre des causes des accidents routiers qui pourraient être évitées aujourd’hui par l’utilisation de technologies existantes, largement disponibles et abordables »[[Opinion: A threat to progress on preventing road deaths, consultable ici: http://etsc.eu/opinion-a-threat-to-progress-on-preventing-road-deaths/]]. Les décideurs oublient également que la masse et la puissance mécanique des véhicules ne cessent d’augmenter au détriment de la sécurité routière et de l’environnement et qu’il conviendrait de mettre fin à cette évolution[[C’est dans ce but qu’a été développé le projet LISA Car: http://lisacar.eu/]]. Ils oublient ou ignorent par ailleurs que certains équipements dits « de confort » (comme les écrans tactiles), en cours de généralisation, sont des vecteurs de distraction – donc de fautes de conduite et d’accidents.
Pour Antonio Avenoso, il convient d’agir sans attendre : « L’UE a tardé à agir pour améliorer les obligations minimales en matière de sécurité des véhicules, et ce depuis presque une décennie ; mais une proposition majeure est attendue en mai (la révision du règlement général sur la sécurité routière, qui fixe notamment les normes d’équipement des véhicules). Le risque est que les Etats européens laissent encore une fois le champ libre aux constructeurs. Ceux-ci pourraient argumenter que l’autonomie complète est imminente (pour demander que les technologies existantes telles le contrôle automatique de vitesse ne soient pas rendus obligatoires). En fait, c’est l’argument que nous, et nos collègues européens, entendons régulièrement ces derniers temps. Mais retarder ou empêcher l’action maintenant serait un désastre. Spécialement si, comme c’est probable, l’automatisation complète rencontre de graves problèmes pratiques de mise en œuvre. »
Un autre aspect mérite une attention particulière. Une voiture partiellement automatisée requiert que le conducteur « reprenne la main » dans certaines conditions (niveaux 3 et 4 d’automatisation). Une étude[[Takeover Time in Highly Automated Vehicles: Noncritical Transitions to and From Manual Control, Alexander Eriksson, Neville A. Stanton, University of Southampton (UK)]] a montré qu’il faudra entre 1,9 et 25,7 secondes à une personne n’exerçant pas de contrôle manuel ni visuel sur la marche du véhicule pour reprendre le contrôle des opérations de conduite. Ce qui risque de n’être pas sans conséquences sur la sécurité routière…
Suite ici. Nous y aborderons la question du rapport aux transports en commun, celle du partage de l’espace public et celle des potentiels effets sociaux… et autres.


")